一种基于环境栅格地图的机器人路径规划方法,包括建模与仿真。基于环境栅格地 图的路径规划及路径优化算法,首先建立已知环境的矩形化栅格地图用分区算法实现地图建模。机器人沿着路径即可实现对已知环境区域的全...
”改进A*算法 机器人路径规划方法 环境栅格地图 MATLAB实现 障碍物“ 的搜索结果
A-Star算法是一种基于启发式搜索的一种最好优先的算法,同时又加上了一些约束条件。在状态空间中,对每一个要搜索的位置进行评估,得到最好的位置。再以这个位置进行搜索,直到到达目标位置。这样可以减少搜索范围,降低...
基于蚁群算法的机器人路径规划MATLAB源码,使用网格离散化的方法对带有障碍物的环境建模,使用邻接矩阵存储该环境,使得问题转化为蚁群算法寻找最短路径。

基于遗传优化算法的机器人栅格地图最优路径规划的MATLAB仿真,matlab2021a测试。栅格地图可以编辑修改,障碍物位置可以修改。
路径规划算法占用一个栅格,并通过搜索自由栅格并避开障碍物来规划由多个栅格组成的路径。拓扑方法将机器人的工作环境图规划成几个小空间,并通过小空间之间的连接线建立拓扑网络结构,路径规划算法搜索拓扑网络以...


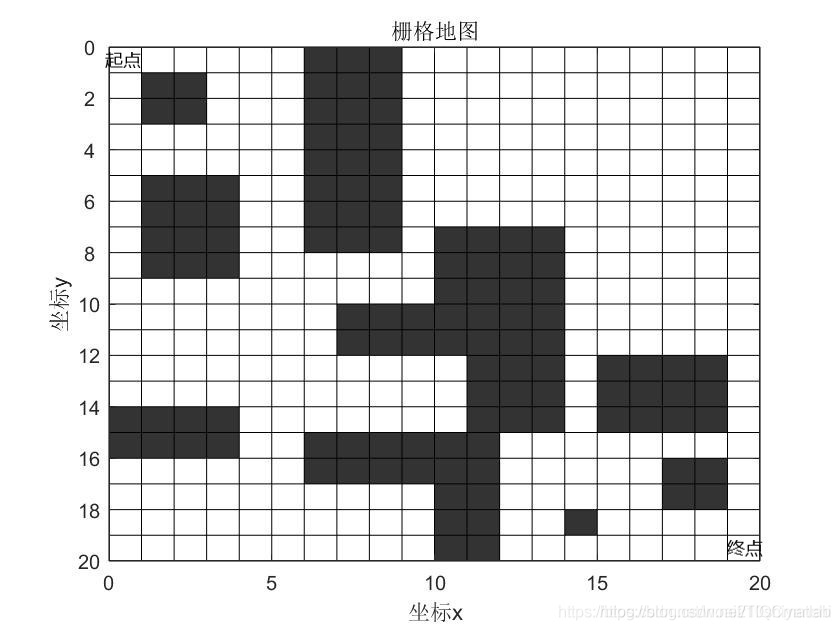
对传统的A*算法进行matlab仿真实验,位做改进,只为给读者提供最原始简介的实验环境,避免因为过度的改进造成不必要的理解误区。该实验程序可自由定义栅格地图大小,自由定义障碍物的摆放位置与数量,同时也可以生成...


一种基于动态权重的A星算法改进方法,其中方法包括:对A星算法的估价函数进行改进;设计动态权值生成器,根据环境信息实时生成当前节点的启发式权值;当机器人离起始点较近时,h(n)占的比重较大;当机器人不断接近目标时,g...
A*(A-star)算法是一种常用且高效的路径规划算法,可以帮助机器人在给定的栅格地图上找到最短路径。当A*算法找到目标节点时,我们可以通过反向追溯的方式,从目标节点开始向起始节点回溯,得到一条最短路径。算法、...



在深蓝学院给的matlab代码框架下实现了A star算法


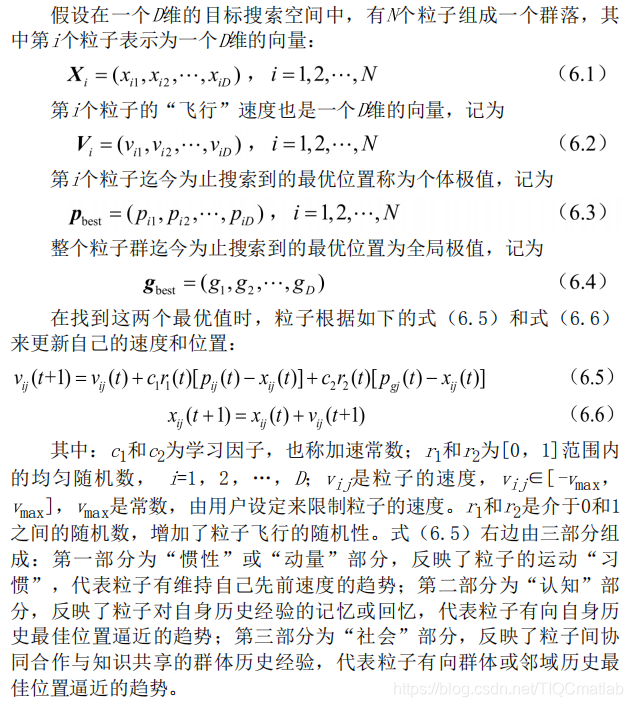
在现实世界中,机器人通常需要在复杂的环境中导航,包括避开障碍物、优化行进距离和时间等。因此,路径规划算法的设计和优化对于机器人的智能导航至关重要。在路径规划算法中,粒子群优化(Particle Swarm ...
基于MATLAB的A*算法可以用于实现机器人在栅格地图上的三维路径规划。A*算法是一种启发式搜索算法,可以有效地找到从起点到终点的最短路径。 首先,我们需要将栅格地图表示为一个三维矩阵。该矩阵的维度为地图的长度...
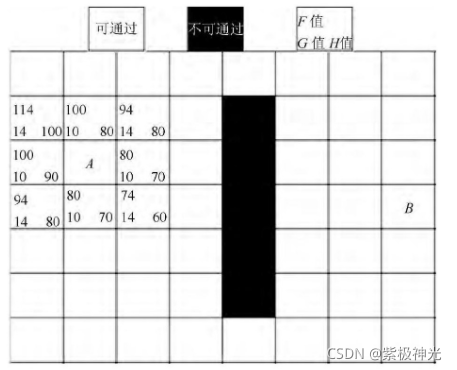
算法会计算每个节点的估价函数f值,f值由已知的g值和h值计算而来,其中g值为起点到当前节点的实际代价,h值为当前节点到目标节点的估计代价。在创建节点的过程中,我们需要传入节点的位置pos、父节点parent、g值和h...
Matlab遗传算法扫地机器人路径规划算法代码实现路径规划,栅格法画地图,障碍物位置可以自己定义,画出平均路径和最短路径曲线,适应度函数考虑路线顺滑度和距离两个因素。
基于A*算法实现机器人在栅格地图上的全路径规划可以按照以下步骤进行:地图建模:将栅格地图转换为图形表示,其中每个栅格表示一个节点。确定地图中起始点和目标点的位置。初始化数据结构:创建一个开列表(open ...
推荐文章
- confluence搭建部署_ata confluence-程序员宅基地
- SpringCloud与SpringBoot版本对应关系_springboot 2.1.1 对于的cloud-程序员宅基地
- 如何恢复硬盘数据?简单解决问题_磁盘恢复 csdn-程序员宅基地
- 苹果手机测试网络速度的软件,App Store 上的“网速测试大师-测网速首选”-程序员宅基地
- 教了一年少儿编程,说说感想和体验-程序员宅基地
- 22东华大学计算机专硕854考研上岸实录-程序员宅基地
- 如何用《玉树芝兰》入门数据科学?-程序员宅基地
- macOS使用brew包管理器_brew清理缓存-程序员宅基地
- 【echarts没有刷新】用按钮切换echarts图表的时候,该消失的图表还在,加个key属性就解决了_echarts 怎么加key值-程序员宅基地
- 常用机器学习的模型和算法_常见机器学习模型算法整理和对应超参数表格整理-程序员宅基地